
Category: Virtual Reality
Protected: Space VR Test
Rose Playhouse
Rose Playhouse Video – Phase 1
Click below for Rose Playhouse Research Documentation, Phases I and II:
3d modelling the rose playhouse – research document, phases i and ii
PolyPixel Countryside
3D Panoramic View captured from the Countryside environment created by the excellent PolyPixel3D.com
Click on the Play icon to scroll around.
Then, if viewing on a phone or tablet, click the Compass icon to look around using the device transducer.
Use the icon that looks like a Band-aid to view using Google Cardboard or similar.
The Rose Playhouse Panoramas
Virtual Reality 360 views of The Rose Playhouse.
Instructions:
If viewing on a desktop or laptop computer:
- Scroll down and choose a panorama to view.
- Click on the Play icon then, when loaded, scroll around with the mouse to view from different directions.
If viewing on a phone or tablet:
- Scroll down and choose a panorama to view.
- Click on the Play icon then, when loaded, scroll around with your finger to view from different directions, OR
- Click on the Compass Icon and you can move the device itself around to view. Just make sure you don’t have a case with a magnet to interfere with the device transducer readings, OR
- If you have a Google Cardboard Viewer or similar, click on the icon that looks a bit like a Band-Aid and insert your phone in the viewer.
Enjoy!
Eric
The views:
Outside Chomley’s House:
Outside the Rose Playhouse:
Standing inside the entrance:
Standing in the yard:
Standing on the stage:
View from the 2nd tier gallery:
Protected: The Rose Theatre entrance
Protected: The Rose Theatre VR 360
Beagle 2
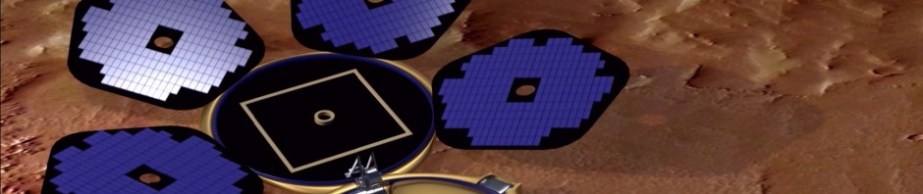
It was fun to be part of this interesting De Montfort University / Leicester University project using “reflection analysis” and a Virtual Reality reconstruction of the ill-fated Beagle 2 Mars Lander to inform on the reason for mission failure and the present state of Lander deployment.
“Scientists have discovered new clues about the fate of the British-made Beagle 2 Mars lander, thanks to a new research technique. The probe was discovered on the surface of Mars in November 2014 using images from NASA’s Mars Reconnaissance Orbiter (MRO), but questions remained about what had caused its failure to contact Earth. The new findings indicate that Beagle 2 landed on Mars and deployed at least three of its four solar panels.”
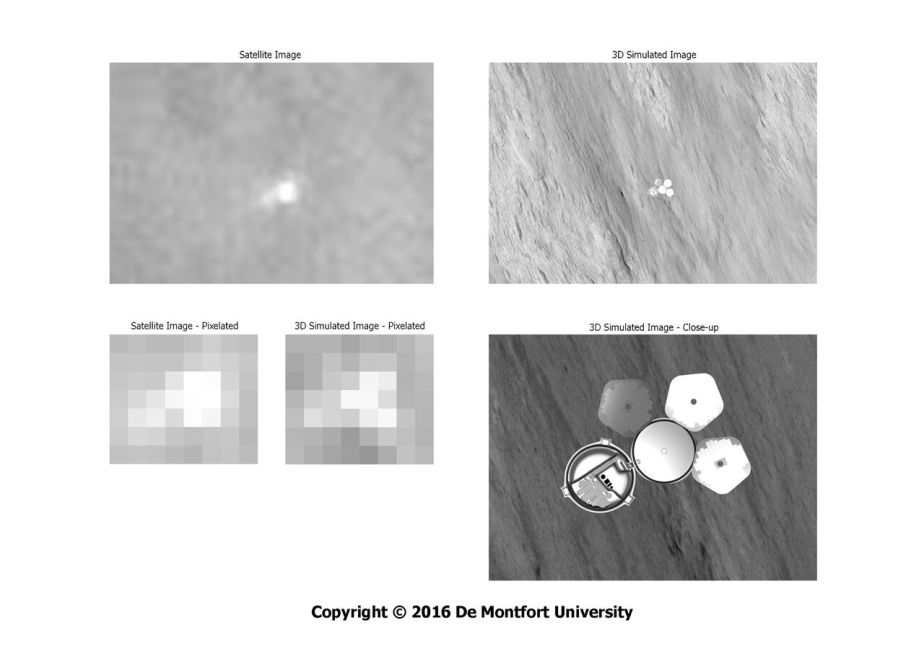
“Beagle 2 was part of the European Space Agency’s (ESA) Mars Express mission launched in June 2003. Beagle 2 was successfully ejected from the Mars Express spacecraft on December 19, 2003, but the lander failed to send a scheduled signal that it had successfully landed on the Martian surface on December 25. Although Beagle 2 was detected by MRO’s HiRISE camera in 2014, the exact configuration of the lander on Mars was unknown due to the lander’s small size and the camera’s resolution.”
“Professor Mark Sims, former Beagle 2 Mission Manager and Professor of Astrobiology and Space Instrumentation at the University of Leicester, developed the concept of ‘reflection analysis’ – matching simulated and real images of Beagle 2. The technique is based on simulations of possible configurations of the lander on the Martian surface and comparing the light of Sun reflected by the simulated lander with raw images from the HiRISE camera at a number of different Sun angles.”
“Nick Higgett, leader of the MA Digital Design group at De Montfort University (DMU), along with 3-D specialists Teodora Kuzmanova and Dr. Eric Tatham, used 3-D software to model the scene in three dimensions. The simulation was done by adjusting the position of the Sun as well as the orientation and angle of Beagle 2, and then unfolding the four solar panels at different angles until they found the best match with original NASA images.”
“ ‘This unique University collaboration between space scientists and digital designers allowed the reflection analysis concept to be put into practice and tested and ultimately produce these exciting results,’ said Professor Mark Sims.”
For further details see https://beagle2.our.dmu.ac.uk/
The Rose Theatre Project
Virtual Reality 3D reconstruction of the medieval Rose Theatre, London.
Currently a work in progress.
This is how Phase I of the building is thought to have looked. The building was later improved and enlarged.

The Rose was built in 1587 by Philip Henslowe and by a grocer named John Cholmley who lived in the house that can be seen next door to the Rose. The Globe Theatre was later built just across the road from the Rose. Henslowe gave up the playhouse in 1605 when the rent was increased significantly and it is believed to have been demolished shortly afterwards.
The building foundations survive to this day. They are flooded with water for preservation but can be visited. They are to be found in the basement of an office building in Park Street near Southwark Bridge just a few hundred metres from the current location of Shakespeare’s Globe Theatre.
Internal screenshots can be found under the Virtual Reality category link on the right.
The Rose Theatre
Mixed Reality is currently working on a Virtual Reality reconstruction of the Rose Theatre (London, 1587).
It is a work in progress but making for a great experience, especially when explored using the HTC Vive.


